MASTER THESIS PROPOSALS
GAN-based augmentation of wholeslides images for colorectal polyps characterization
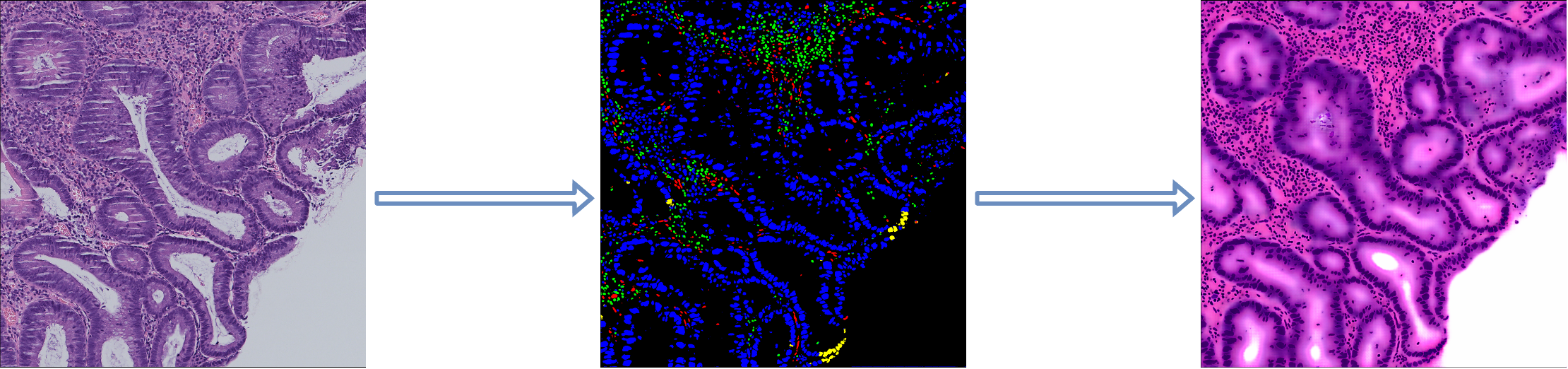
Histopathological characterization of colorectal polyps allows to tailor patients’ management and follow up with the ultimate aim of avoiding or promptly detecting an invasive carcinoma. Colorectal polyps characterization relies on the histological analysis of tissue samples to determine the polyps malignancy and dysplasia grade. Deep neural networks achieve outstanding accuracy in medical patterns recognition, however they require large sets of annotated training images.
The aim of this thesis is to employ generative models (i.e GANs) for the generation of synthetic tissue patches and to assess the potential benefits when used in conjuction with real-world data, for predicting the dysplasia grade (i.e. how likely the tissue is to develop into cancer). The generation process will start from segmentation maps, in order to allow for finer control over the synthesized images.
References:
[1] L. Hou, A. Agarwal, D. Samaras, T. M. Kurc, R. R. Gupta and J. H. Saltz, “Robust Histopathology Image Analysis: To Label or to Synthesize?,” 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 2019, pp. 8525-8534, doi: 10.1109/CVPR.2019.00873.
[2] Barbano, C. A., Perlo, D., Tartaglione, E., Fiandrotti, A., Bertero, L., Cassoni, P., & Grangetto, M. (2021). UniToPatho, a labeled histopathological dataset for colorectal polyps classification and adenoma dysplasia grading. arXiv preprint arXiv:2101.09991.
[3] Luca Bertero, Carlo Alberto Barbano, Daniele Perlo, Enzo Tartaglione, Paola Cassoni, Marco Grangetto, Attilio Fiandrotti, Alessandro Gambella, Luca Cavallo. (2021). UNITOPATHO. IEEE Dataport. https://dx.doi.org/10.21227/9fsv-tm25
Watermarking trained deep neural networks
In questa proposta di tesi lo studente dovra’ studiare le metodologie stato dell’arte di addestramento per reti neurali profonde sui piu’ comuni problemi di apprendimento per classificazione di immagini (MNIST, CIFAR-10, ImageNet). Successivamente, sui modelli gia’ addestrati, lo studente embeddera’ watermark in queste reti neurali. In particolare, lo studente affrontera’ il problema “white box” in cui il watermark verra’ embeddato direttamente nei parametri appresi del modello, e il problema “black box”, in cui non si ha diretto accesso ai parametri del modello. Lo studente valutera’ la robustezza del watermark rispetto ad alcuni attacchi (fine-tuning, quantizzazione, pruning), andando a valutare l’efficacia di diverse strategie di watermark embedding.
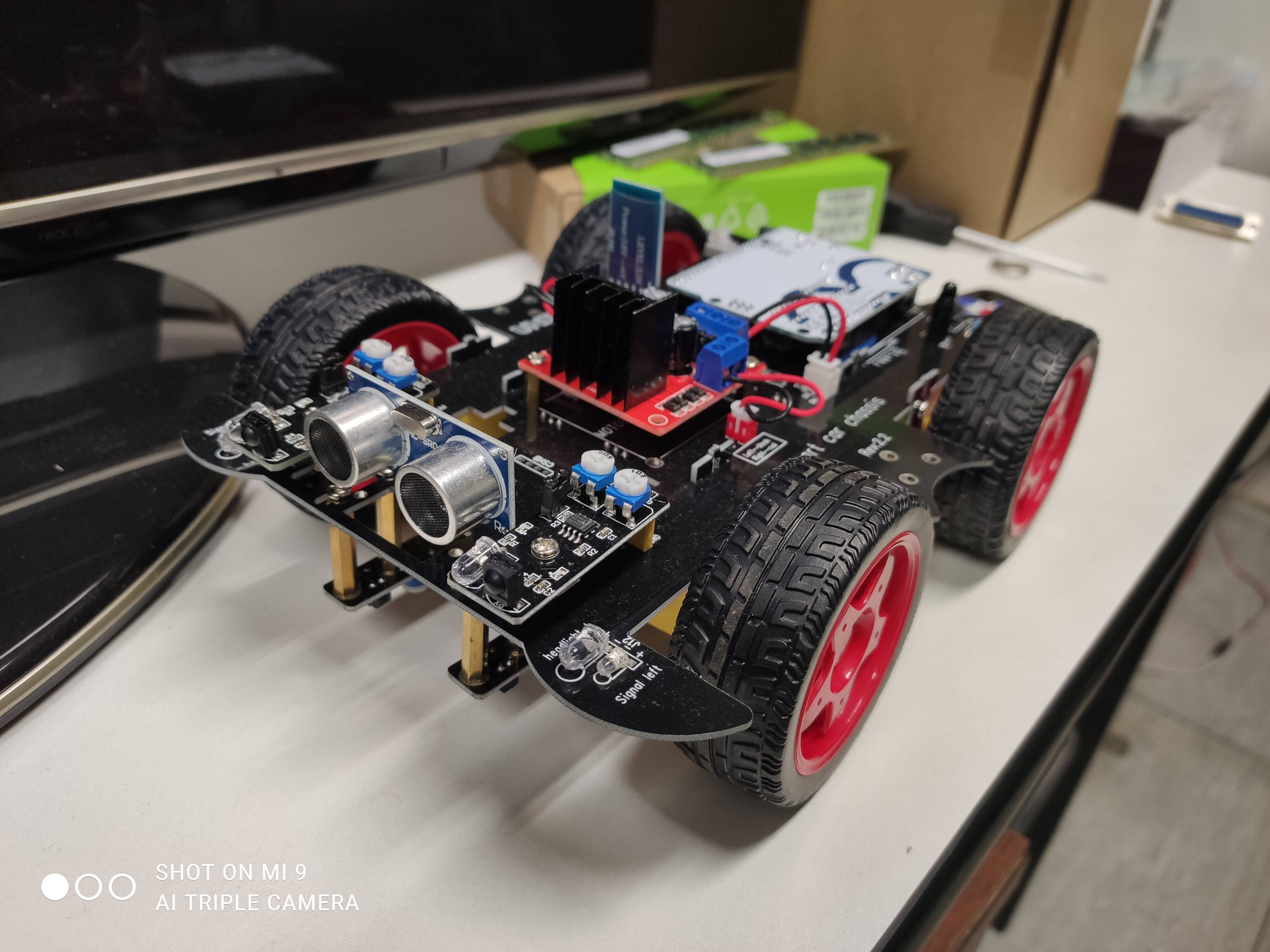
Reinforcement learning with transfer learning on self-driving toy car
Recent years have seen a surge of applicative successes using Reinforcement Learning (RL) [1] to solve challenging games and smaller domain problems [2][3][4]. These successes in RL have been achieved in part due to the strong collaborative effort by the RL community to work on common, open-sourced environment simulators such as OpenAI’s Gym [5] that allow for expedited development and valid comparisons between different, state-of-art strategies. However many existing environments contain games rather than real-world problems. Only recent publications initiate the transition to application-oriented RL [6][7].
The aim of this thesis is to train a simple RL-based system on synthetic data (https://github.com/duckietown/gym-duckietown) and to deploy it on a toy car.
For this thesis, both low-level (eg. C) and high-level (Python) coding will be required.
References:
[1] R. Sutton and A. Barto, Introduction to Reinforcement Learning (1988), MIT Press
[2] V. Mnih and K. Kavukcuoglu and D. Silver and A. Graves and I. Antonoglou and D. Wierstra and M. A. Riedmiller, Playing Atari with Deep Reinforcement Learning (2013), CoRR
[3] D. Silver and J. Schrittwieser and K. Simonyan K and I. Antonoglou and A. Huang and A. Guez and T. Hubert and L. Baker and M. Lai and A. Bolton, et al., Mastering the game of go without human knowledge (2017), Nature
[4] R. Liessner and C. Schroer and A. Dietermann and B. Bäker, Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles (2018), ICAART
[5] G. Brockman and V. Cheung and L. Pettersson and J. Schneider and J. Schulman and J. Tang and W. Zaremba, OpenAI Gym. CoRR, 2016.
[6] M. Andrychowicz, B. Baker, M. Chociej, R. Jozefowicz, et al., Learning Dexterous In-Hand Manipulation. CoRR, 2018.
[7] F. Richter, R. K. Orosco, M. C. Yip, Open-Sourced Reinforcement Learning Environments for Surgical Robotics, CoRR, 2019.
[8] https://www.youtube.com/watch?v=vd2cP3UfQ88